27 KiB
设备驱动
树莓派上有着丰富的外围设备(peripherals),物理地址空间 0x3F000000~0x3FFFFFFF 专门用于访问外围设备。
一个设备一般提供多个可供访问的 IO 地址,一般 4 字节对齐。将它们按给定的偏移构造结构体,并使用 crate volatile 抽象为一些寄存器,可方便地对这些 IO 地址进行读写,例如:
const INT_BASE: usize = IO_BASE + 0xB000 + 0x200;
#[repr(C)]
#[allow(non_snake_case)]
struct Registers {
IRQBasicPending: ReadOnly<u32>,
IRQPending: [ReadOnly<u32>; 2],
FIQControl: Volatile<u32>,
EnableIRQ: [Volatile<u32>; 2],
EnableBasicIRQ: Volatile<u32>,
DisableIRQ: [Volatile<u32>; 2],
DisableBasicIRQ: Volatile<u32>,
}
pub fn new() -> Controller {
Controller {
registers: unsafe { &mut *(INT_BASE as *mut Registers) },
}
}
这些外围设备的最底层驱动实现在 crate bcm2837 中,包括:
- GPIO
- Interrupt
- Mini UART
- Mailbox
- Timer
一些稍微高级的与具体硬件板子相关的驱动实现在 kernel/src/arch/aarch64/board/raspi3 中,包括:
- Framebuffer
- Mailbox property interface
- Serial
更高级的硬件无关的驱动实现在 kernel/src/arch/aarch64/driver 中,包括:
- Console
GPIO
参考:BCM2837 ARM Peripherals: chapter 6, General Purpose I/O (GPIO).
目前 RustOS 中的 GPIO 驱动只是为了初始化 mini UART 而使用,实现在 crate bcm2837 的 gpio.rs 中。主要提供两个功能:
- 设置引脚模式
- 设置引脚上拉/下拉状态
设置引脚模式
引脚模式有 8 种:输入、输出与 alternative function 0~5。根据引脚编号向相应的 GPFSELx 寄存器的相应位写入模式代码即可。
pub fn into_alt(self, function: Function) -> Gpio<Alt> {
let select = (self.pin / 10) as usize;
let offset = 3 * (self.pin % 10) as usize;
self.registers.FSEL[select].update(|value| {
*value &= !(0b111 << offset);
*value |= (function as u32) << offset;
});
self.transition()
}
pub fn into_output(self) -> Gpio<Output> {
self.into_alt(Function::Output).transition()
}
pub fn into_input(self) -> Gpio<Input> {
self.into_alt(Function::Input).transition()
}
设置引脚上拉/下拉状态
引脚的上拉/下拉状态有 3 种:上拉(10)、下拉(01)与不拉(00)。设置该状态的流程如下:
- 向 GPPUD 寄存器写入状态代码。
- 等待 150 个时钟周期。
- 根据引脚编号向相应的 GPPUDCLK0/1 寄存器的相应位写入 1。
- 等待 150 个时钟周期。
- 向 GPPUD 寄存器写入 0。
- 根据引脚编号向相应的 GPPUDCLK0/1 寄存器的相应位写入 0。
pub fn set_gpio_pd(&mut self, pud_value: u8) {
let index = if self.pin >= 32 { 1 } else { 0 };
self.registers.PUD.write(pud_value as u32);
delay(150);
self.registers.PUDCLK[index as usize].write((1 << self.pin) as u32);
delay(150);
self.registers.PUD.write(0);
self.registers.PUDCLK[index as usize].write(0);
}
Interrupt
参考:BCM2837 ARM Peripherals: chapter 7, Interrupts.
该设备为其他外围设备提供异步异常(中断)支持,实现在 crate bcm2837 的 interrupt.rs 中。目前只有对 IRQ 的支持,没有对 FIQ 的支持。
当中断发生时,IRQ basic pending 寄存器中的某些位会被设置,表示哪个 basic IRQ 待处理(详见 BCM2837 ARM Peripherals 第 114 页的表)。如果其第 8 或 9 位被设置,则需要进一步到 IRQ pending 1/2 寄存器中去查找。此时共有 64 个中断,部分如下(详见第 113 页的表):
| 编号 | 中断 |
|---|---|
| 1 | system timer 1 |
| 3 | system timer 3 |
| 9 | USB controller |
| 29 | Aux int |
| 49 | gpio[0] |
| 50 | gpio[1] |
| 51 | gpio[2] |
| 52 | gpio[3] |
| 57 | uart_int |
| ... | ... |
目前 RustOS 只支持上表中的 IRQ,不支持其他 basic IRQ。在 RustOS 中用到了 System Timer 与 mini UART 的 IRQ,分别为 system timer 1 (1) 与 Aux int (29)。
在 kernel/src/arch/aarch64/board/raspi3/irq.rs 中实现了 IRQ 的注册,只需调用 register_irq() 函数绑定 IRQ 编号与处理函数,在 handle_irq() 里就会自动处理已注册的中断。
启用与禁用中断
只需分别向 Enable IRQs 1/2 和 Disable IRQs 1/2 寄存器的相应位写 1 即可:
pub fn enable(&mut self, int: Interrupt) {
self.registers.EnableIRQ[int as usize / 32].write(1 << (int as usize) % 32);
}
pub fn disable(&mut self, int: Interrupt) {
self.registers.DisableIRQ[int as usize / 32].write(1 << (int as usize) % 32);
}
获取待处理的中断
只需读取 IRQ pending 1/2 寄存器中的相应位,就能知道某一 IRQ 是否待处理:
pub fn is_pending(&self, int: Interrupt) -> bool {
self.registers.IRQPending[int as usize / 32].read() & (1 << (int as usize) % 32) != 0
}
此外也可将当前所有待处理的 IRQ 构成一个迭代器方便遍历:
pub struct PendingInterrupts(u64);
impl Iterator for PendingInterrupts {
type Item = usize;
#[inline]
fn next(&mut self) -> Option<Self::Item> {
let int = self.0.trailing_zeros();
if int < 64 {
self.0 &= !(1 << int);
Some(int as usize)
} else {
None
}
}
}
pub fn pending_interrupts(&self) -> PendingInterrupts {
let irq1 = self.registers.IRQPending[0].read() as u64;
let irq2 = self.registers.IRQPending[1].read() as u64;
PendingInterrupts((irq2 << 32) | irq1)
}
Mini UART
参考:BCM2837 ARM Peripherals: chapter 2, Auxiliaries: UART1 & SPI1, SPI2; chapter 6, General Purpose I/O (GPIO), page 101~102.
Mini UART 可用于树莓派与上位机直接的通信,一般被称为“串口”。该驱动实现简单,在没有显示器、键盘等驱动时是一种非常好的输入输出设备。
RustOS 中 mini UART 的驱动主要实现在 crate bcm2837 的 mini_uart.rs 中。在 kernel/src/arch/aarch64/board/raspi3/serial.rs 中将其封装为了一个 SerialPort,以便通过统一的接口调用。
初始化
初始化 mini UART 的流程如下:
-
向 AUX_ENABLES 寄存器写 1,启用 mini UART。
-
将 GPIO 的 14/15 引脚都设为 alternative function ALT5 (TXD1/RXD1) 模式,并都设为不拉状态。
-
配置 mini UART 参数:
- 暂时禁用接收器与发送器。
- 启用接收中断,禁用发送中断。
- 设置数据大小为 8 bit。
- 设置 RTS line 为 high。
- 设置波特率为 115200。
- 重新启用接收器与发送器。
pub fn init(&mut self) {
// Enable the mini UART as an auxiliary device.
unsafe { (*AUX_ENABLES).write(1) }
Gpio::new(14).into_alt(Function::Alt5).set_gpio_pd(0);
Gpio::new(15).into_alt(Function::Alt5).set_gpio_pd(0);
self.registers.AUX_MU_CNTL_REG.write(0); // Disable auto flow control and disable receiver and transmitter (for now)
self.registers.AUX_MU_IER_REG.write(1); // Enable receive interrupts and disable transmit interrupts
self.registers.AUX_MU_LCR_REG.write(3); // Enable 8 bit mode
self.registers.AUX_MU_MCR_REG.write(0); // Set RTS line to be always high
self.registers.AUX_MU_BAUD_REG.write(270); // Set baud rate to 115200
self.registers.AUX_MU_CNTL_REG.write(3); // Finally, enable transmitter and receiver
}
读
pub fn has_byte(&self) -> bool {
self.registers.AUX_MU_LSR_REG.read() & (LsrStatus::DataReady as u8) != 0
}
pub fn read_byte(&self) -> u8 {
while !self.has_byte() {}
self.registers.AUX_MU_IO_REG.read()
}
写
pub fn write_byte(&mut self, byte: u8) {
while self.registers.AUX_MU_LSR_REG.read() & (LsrStatus::TxAvailable as u8) == 0 {}
self.registers.AUX_MU_IO_REG.write(byte);
}
Timer
BCM283x 系列可用下列三种不同的时钟:
- System Timer:BCM2837 ARM Peripherals 第 12 章,IO 基地址为
0x3F003000,最常用的时钟,但是在 QEMU 中不可用。 - ARM Timer:BCM2837 ARM Peripherals 第 14 章,IO 基地址为
0x3F00B400,在 QEMU 中也不可用,RustOS 并未实现。 - Generic Timer:ARMv8 Reference Manual 第 D10 章,通过 AArch64 系统寄存器访问 CPU 的时钟,外围设备只提供了中断控制(IO 基地址为
0x40000000),可同时在 QEMU 与真机上使用。
时钟主要实现在 crate bcm2837 的 timer 模块中。可以指定 crate bcm2837 的 feature use_generic_timer 来选择是否使用 Generic Timer。在 mod.rs 中提供了以下 trait,具体的时钟驱动需要实现这些函数:
/// The Raspberry Pi timer.
pub trait BasicTimer {
/// Returns a new instance.
fn new() -> Self;
/// Initialization timer.
fn init(&mut self);
/// Reads the timer's counter and returns the 64-bit counter value.
/// The returned value is the number of elapsed microseconds.
fn read(&self) -> u64;
/// Sets up a match in timer 1 to occur `us` microseconds from now. If
/// interrupts for timer 1 are enabled and IRQs are unmasked, then a timer
/// interrupt will be issued in `us` microseconds.
fn tick_in(&mut self, us: u32);
/// Returns `true` if timer interruption is pending. Otherwise, returns `false`.
fn is_pending(&self) -> bool;
}
在 kernel/src/arch/aarch64/board/raspi3/timer.rs 中对这些函数进行了简单封装。在 kernel/src/arch/aarch64/board/raspi3/irq.rs 的 handler_irq() 函数中处理了时钟中断:
let controller = bcm2837::timer::Timer::new();
if controller.is_pending() {
super::timer::set_next();
crate::trap::timer();
}
System Timer
参考:BCM2837 ARM Peripherals: chapter 12, System Timer.
System Timer 通过 CS、CLO、CHI 等 IO 地址访问时钟,通过上文 Interrupt 节描述的 IRQ 控制器提供中断(IRQ 编号为 system timer 1)。实现方式如下:
- 初始化:使用 interrupt 模块的
enable()函数启用 system timer 1 IRQ。 - 当前时刻:分别读取时钟计数器的高、低 32 位(CLO、CHI),再拼接起来得到 64 位计数器值(单位微秒)。
- 设置下一次中断的时刻:向 System Timer Compare 1 (C1) 寄存器写入当前计数器值加上时间间隔,同时向 System Timer Control/Status (CS) 寄存器的第 1 位写入 1 表示当前的中断已被处理好。
- 判断是否有时钟中断:使用 interrupt 模块的
is_pending()函数。
fn init(&mut self) {
Controller::new().enable(Interrupt::Timer1);
}
fn read(&self) -> u64 {
let low = self.registers.CLO.read();
let high = self.registers.CHI.read();
((high as u64) << 32) | (low as u64)
}
fn tick_in(&mut self, us: u32) {
let current_low = self.registers.CLO.read();
let compare = current_low.wrapping_add(us);
self.registers.COMPARE[SystemTimerId::Timer1 as usize].write(compare);
self.registers.CS.write(1 << (SystemTimerId::Timer1 as usize)); // unmask
}
fn is_pending(&self) -> bool {
let controller = Controller::new();
controller.is_pending(Interrupt::Timer1)
}
Generic Timer
参考:
- ARMv8 Reference Manual: chapter D10, The Generic Timer in AArch64 state.
- BCM2836 ARM-local peripherals (Quad-A7 control): section 4.6, Core timers interrupts; section 4.10, Core interrupt sources.
RustOS 实现的 Generic Timer 是 CPU 在 EL1 下的 Physical Timer,可通过下列 AArch64 系统寄存器访问:
| Generic Timer 系统寄存器 | 名称 | 描述 |
|---|---|---|
CNTFRQ_EL0 |
Counter-timer Frequency register | 获取时钟的频率,单位 Hz,典型的值为 62.5 MHz |
CNTP_CTL_EL0 |
Counter-timer Physical Timer Control register | 控制 Physical Timer 是否启用,中断是否屏蔽等 |
CNTP_TVAL_EL0 |
Counter-timer Physical Timer TimerValue register | 下一次时钟中断要再经过多少时钟周期。每当时钟计数器增加 1,该值就会减少 1,如果该值为 0 了就会触发时钟中断 |
CNTPCT_EL0 |
Counter-timer Physical Count register | 获取时钟计数器的值 |
而 Generic Timer 的中断控制器需要通过 0x40000000 开始的那些 IO 地址访问。Generic Timer 实现方式如下:
- 初始化:将
CNTP_CTL_EL0寄存器的 ENABLE 位置为 1,启用 CPU Physical Timer;将 Core0 timers Interrupt control 的 CNTPNSIRQ 位置为 1,开启中断。 - 当前时刻:读取
CNTPCT_EL0寄存器获得当前时钟计数器的值,再与时钟频率CNTFRQ_EL0经过简单的换算即能得到以微秒为单位的当前时刻。 - 设置下一次中断的时刻:向
CNTP_TVAL_EL0寄存器写入时间间隔对应的时钟周期数。 - 判断是否有时钟中断:判断 Core0 IRQ Source 的 CNTPNSIRQ 位是否为 1。
fn init(&mut self) {
self.registers.CORE_TIMER_IRQCNTL[0].write(1 << (CoreInterrupt::CNTPNSIRQ as u8));
CNTP_CTL_EL0.write(CNTP_CTL_EL0::ENABLE::SET);
}
fn read(&self) -> u64 {
let cntfrq = CNTFRQ_EL0.get(); // 62500000
(CNTPCT_EL0.get() * 1000000 / (cntfrq as u64)) as u64
}
fn tick_in(&mut self, us: u32) {
let cntfrq = CNTFRQ_EL0.get(); // 62500000
CNTP_TVAL_EL0.set(((cntfrq as f64) * (us as f64) / 1000000.0) as u32);
}
fn is_pending(&self) -> bool {
self.registers.CORE_IRQ_SRC[0].read() & (1 << (CoreInterrupt::CNTPNSIRQ as u8)) != 0
}
Mailbox
Mailbox 是树莓派上 ARM CPU 与 VideoCore IV GPU 之间通信的渠道。Mailbox 能够识别一段按特定格式存储的请求指令,包含请求代码、请求长度、请求参数等信息,GPU 会根据请求的指令完成相应的操作,并将结果写在原处。
BCM283x 系列有两个 mailbox,一般 MB0 总是用于 GPU 向 CPU 发送消息 MB1 总是用于 CPU 向 GPU 发送消息,对 CPU 来说即一个只读一个只写。
Mailbox 有若干通道(channels),不同通道提供不同种类的功能。一般使用 property tags 通道(编号为 8),即 mailbox property interface。
基本读写
参考:https://github.com/raspberrypi/firmware/wiki/Accessing-mailboxes
对 mailbox 的基本读写实现在 crate bcm2837 的 mailbox.rs 中。一般一次操作是向 mailbox 写入请求的地址,然后读 mailbox 来轮询等待操作完成。注意读写 mailbox 时只有数据的高 28 位有效,低 4 位被用于存放通道,所以如果写入的是一个地址则该地址必须 16 字节对齐。
读的流程如下:
- 读状态寄存器 MAIL0_STA,直到 empty 位没有被设置。
- 从 MAIL0_RD 寄存器读取数据。
- 如果数据的最低 4 位不与要读的通道匹配,则回到 1。
- 否则返回数据的高 28 位。
pub fn read(&self, channel: MailboxChannel) -> u32 {
loop {
while self.registers.MAIL0_STA.read() & (MailboxStatus::MailboxEmpty as u32) != 0 {}
let data = self.registers.MAIL0_RD.read();
if data & 0xF == channel as u32 {
return data & !0xF;
}
}
}
写的流程如下:
- 读状态寄存器 MAIL1_STA,直到 full 位没有被设置。
- 将数据(高 28 位)与通道(低 4 位)拼接,写入 MAIL1_WRT 寄存器。
pub fn write(&mut self, channel: MailboxChannel, data: u32) {
while self.registers.MAIL1_STA.read() & (MailboxStatus::MailboxFull as u32) != 0 {}
self.registers.MAIL1_WRT.write((data & !0xF) | (channel as u32));
}
Mailbox property interface
参考:https://github.com/raspberrypi/firmware/wiki/Mailbox-property-interface
Mailbox property interface 提供了丰富的访问底层硬件的接口,包括电源、温度、DMA、GPU、内存、Framebuffer 等模块。RustOS 中封装了一系列 mailbox property interface 函数,实现在 kernel/src/arch/aarch64/board/raspi3/mailbox.rs 中。
向 mailbox property interface 发送的请求需要符合一定的格式。在 RustOS 中,对 mailbox property interface 的一个功能调用被称为一个 PropertyMailboxTag,格式如下:
#[repr(C, packed)]
struct PropertyMailboxTag<T: Sized> {
id: PropertyMailboxTagId,
buf_size: u32,
req_resp_size: u32,
buf: T,
}
这里的 buf 一般是一个 32 位无符号整数的数组。一个或多个 PropertyMailboxTag 可构成一个 PropertyMailboxRequest,这是最终需要向 mailbox 发送的请求,格式如下:
#[repr(C, packed)]
struct PropertyMailboxRequest<T: Sized> {
buf_size: u32,
req_resp_code: PropertyMailboxStatus,
buf: T,
end_tag: PropertyMailboxTagId,
}
这里的 buf 可以是多个大小不一的 PropertyMailboxTag 构成的数组,不过内存布局必须连续而没有空隙。
为了方便构造这两个结构体,定义了宏 send_one_tag!() 与 send_request!():
-
send_request!($tags: ident):发送一个或多个PropertyMailboxTag。这会构建一个 16 字节对齐的PropertyMailboxRequest结构体,将其地址写入 mailbox。等待 GPU 操作完毕后,返回被修改过的PropertyMailboxTag列表。 -
send_one_tag!($id: expr, [$($arg: expr),*]):这会根据id与 32 位无符号整数的数组构造一个PropertyMailboxTag结构体,然后通过宏send_request!()发送给 mailbox,返回被修改过的数组。
有了这两个宏,就可以非常方便地实现所需的 mailbox property interface 功能了。例如获取 framebuffer 物理分辨率:
pub fn framebuffer_get_physical_size() -> PropertyMailboxResult<(u32, u32)> {
let ret = send_one_tag!(RPI_FIRMWARE_FRAMEBUFFER_GET_PHYSICAL_WIDTH_HEIGHT, [0, 0])?;
Ok((ret[0], ret[1]))
}
framebuffer_alloc() 函数是一次性发送多个大小不一的 PropertyMailboxTag 的例子。
需要注意的是,当启用 MMU 与 cache 后,在访问 mailbox 的前后都需要刷新整个 PropertyMailboxRequest 结构的数据缓存,因为这里涉及到 GPU 与 CPU 的数据共享,必须时刻保证主存与 cache 中数据的一致性。
Framebuffer
Framebuffer 是一块内存缓存区,树莓派的 GPU 会将其中的数据转换为 HDMI 信号,输出给显示器。Framebuffer 的底层访问接口通过 mailbox property interface 实现。在 RustOS 中,树莓派的 framebuffer 实现在 kernel/src/arch/aarch64/board/raspi3/fb.rs 中。
相关数据结构
fb.rs 中定义了下列结构体:
-
FramebufferInfo:framebuffer 的信息,包括:- 实际可见的分辨率
xres、yres - 虚拟的分辨率
xres_virtual、yres_virtual - 位置偏移
xoffset、yoffset - 颜色深度
depth - 一行的字节数
pitch - GPU 总线地址
bus_addr - 大小
screen_size
- 实际可见的分辨率
-
ColorDepth:表示颜色深度的枚举值,目前支持 16 位和 32 位颜色深度。 -
ColorBuffer:一个 union 类型,可将同一个 framebuffer 基址解析为下列三种类型:- 一个 32 位无符号整数,表示 framebuffer 基址的虚拟地址。
- 一个类型为 16 位整数,大小为 framebuffer 分辨率的数组,表示 16 位颜色深度下的每个像素点。
- 一个类型为 32 位整数,大小为 framebuffer 分辨率的数组,表示 32 位颜色深度下的每个像素点。
union ColorBuffer { base_addr: usize, buf16: &'static mut [u16], buf32: &'static mut [u32], }该 union 还提供了
read16()、write16()、read32()、write32()等函数用于直接读写不同颜色深度下的 framebuffer。 -
Framebuffer:具体的 framebuffer 结构体:pub struct Framebuffer { pub fb_info: FramebufferInfo, pub color_depth: ColorDepth, buf: ColorBuffer, }
初始化
Framebuffer 在函数 Framebuffer::new() 中初始化。流程如下:
- 通过 mailbox property interface,获取 framebuffer 物理分辨率、颜色深度等信息。也可以不获取,而是手动设置。
- 设置好相关参数,调用
mailbox::framebuffer_alloc()由 GPU 分配 framebuffer,构造出FramebufferInfo结构体。 - 将 framebuffer GPU 总线地址转换为物理内存地址,然后调用
memory::ioremap()将这段内存做对等映射,内存属性为 NormalNonCacheable。 - 构造出
Framebuffer结构体并返回。
读写
可通过 Framebuffer::read() 和 Framebuffer::write() 函数读取 framebuffer 中的一个像素,或写入一个像素。
为了提升连续区域读写的速度,还实现了 Framebuffer::copy() 与 Framebuffer::fill() 函数,分别用于拷贝一块区域、将一块区域都置为同一颜色。具体做法是将连续几个像素拼成一个 64 位整数,以减少访存次数。
Framebuffer::clear() 函数用于将屏幕清空(黑屏)。
Console
有了 framebuffer,就可以将显示器作为输出设备显示字符了。为此 Console (控制台) 是一个平台无关的抽象输出设备,表示屏幕上要显示的字符矩阵。该设备负责将字符转成像素点写入 framebuffer 中,以实现显示器中字符的显示,并支持颜色、字体等多种效果。
Console 驱动实现在模块 kernel/src/arch/aarch64/driver/console 中,依赖 framebuffer,包含下面几部分:
- 控制台主体(mod.rs)
- 颜色(color.rs)
- 字体(fonts)
- ANSI 转移序列解析器(escape_parser.rs)
控制台主体
包含下列结构体:
-
ConsoleChar:控制台中的字符,由 ASCII 码ascii_char与字符属性attr(详见下节“ANSI 转移序列解析器”)构成。 -
ConsoleBuffer:控制台字符缓冲区,是一个num_row行num_col列,元素类型是ConsoleChar的二维数组。主要包含以下函数:write():向(row, col)处写入一个字符ch。这会根据给定的字体与字符属性,将字符转成像素点呈现在 framebuffer 上。new_line():向字符缓冲区的底部插入一个新行,并将原来的内容都向上平移一行。在真机上测试时,发现 framebuffer 读的速度非常慢,所以没有用Framebuffer::copy()函数直接拷贝 framebuffer 内容,而是根据新的字符缓冲区重新绘制。clear():清空屏幕与字符缓冲区内容。
-
Console:具体的控制台结构体,通过传入的字体泛型<F: Font>构造,包含当前光标位置(row, col)、 ANSI 转移序列解析器parser以及控制台字符缓冲区buffer,主要包含以下函数:new():根据FramebufferInfo新建一个Console对象。当前字体下字符的高、宽与 framebuffer 分辨率将决定字符缓冲区的大小。write_byte():向当前光标位置处写入一个字符。这会根据具体是什么字符进行相应的操作,包括:直接显示该字符、换行、删除前一个字符、传给转移序列解析器。new_line():换行。如果当前光标位于字符缓冲区最底部则会调用ConsoleBuffer::new_line()移动屏幕内容。clear():清空并初始化。
此外,
Console实现了 traitfmt::Write的write_str()函数,这样就可以用write_fmt()格式化输出了。
颜色
该模块定义了 16 种颜色(8 种标准颜色与 8 种高亮的标准颜色),并提供了将 RGB 值转换为 framebuffer 可识别的 16/32 位像素值的方法。
字体
该模块定义了统一的字体接口:
pub trait Font {
const HEIGHT: usize;
const WIDTH: usize;
/// the `y` coordinate of underline.
const UNDERLINE: usize;
/// the `y` coordinate of strikethrough.
const STRIKETHROUGH: usize;
/// Whether the character `byte` is visible at `(x, y)`.
fn get(byte: u8, x: usize, y: usize) -> bool;
}
添加一种字体只需实现该 trait 即可,支持下划线与删除线。目前内置了一种 8x16 的字体(直接从 linux 中拷贝而来,CP437 编码)。
ANSI 转移序列解析器
为了在控制台上支持文字颜色等选项,RustOS 实现了一个简易的 ANSI 转移序列(ANSI escape sequences)解析器,可识别标准的ANSI 转移序列并呈现在屏幕上,支持下列 SGR (Select Graphic Rendition) 字符属性:
| SGR 代码 | 效果 |
|---|---|
| 0 | 重置为默认 |
| 4 | 下划线 |
| 7 | 反转前景与背景色 |
| 9 | 删除线 |
| 24 | 取消下划线 |
| 27 | 取消反转前景与背景色 |
| 29 | 取消删除线 |
| 30~37 | 设置前景色 |
| 40~47 | 设置背景色 |
| 90~97 | 设置高亮前景色 |
| 100~107 | 设置高亮背景色 |
具体实现时,结构体 EscapeParser 维护了一个状态机,通过 parse() 函数传入一个字符,转移状态,解析出 SGR 参数并更新当前字符属性;通过 char_attribute() 函数获取当前的字符属性。
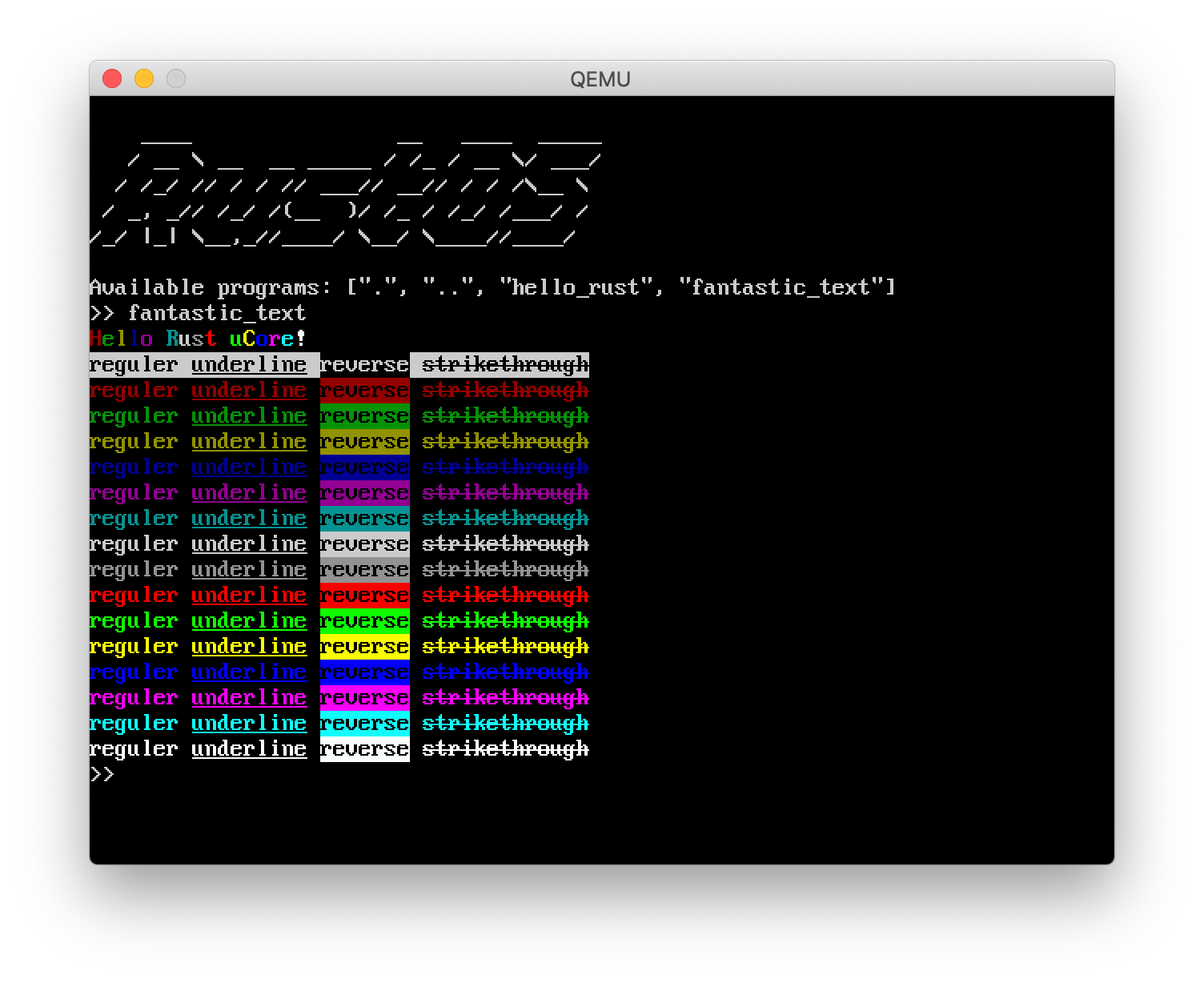
目前显示效果与在终端下使用 screen 获取串口输出的效果一致,如在 QEMU 中运行 fantastic_text 测例的效果如下: